
RESUMO
Guia Completo de Visão Computacional com Python e OpenCV
Desvende a Visão Computacional e construa aplicações de IA com Python e OpenCV.
Keywords: Visão Computacional, Python OpenCV, Detecção de Objetos
NAVEGAÇÃO
ÍNDICE
INTRODUÇÃO
1. Contexto e Introdução à Visão Computacional
A Visão Computacional (VC) é uma área da Inteligência Artificial (IA) que capacita computadores a “ver”, interpretar e compreender imagens e vídeos do mundo real. Em 2026, a VC não é mais uma tecnologia de ficção científica, mas uma ferramenta indispensável em uma miríade de setores, desde a automação industrial e segurança até a medicina e o varejo. Sua capacidade de extrair informações significativas de dados visuais impulsiona inovações que remodelam indústrias inteiras, tornando processos mais eficientes, seguros e inteligentes.
Este guia do Kwontudo tem como objetivo desmistificar a Visão Computacional para desenvolvedores e entusiastas, oferecendo um caminho claro para construir suas primeiras aplicações práticas usando Python e OpenCV. Escolhemos Python por sua sintaxe clara e vasta comunidade, e OpenCV (Open Source Computer Vision Library) por ser a biblioteca padrão da indústria, oferecendo uma gama robusta de algoritmos para processamento de imagem e vídeo.
Por Que a Visão Computacional é Crucial em 2026?
No cenário tecnológico atual, a Visão Computacional é um pilar da transformação digital. Vejamos alguns exemplos concretos de sua aplicação e impacto:
- Veículos Autônomos: Sistemas de VC permitem que carros “enxerguem” a estrada, detectem pedestres, sinais de trânsito e outros veículos, garantindo uma navegação segura. A precisão na detecção é medida em milissegundos, com taxas de erro em reconhecimento de objetos abaixo de 1% em condições ideais.
- Saúde: Auxilia no diagnóstico de doenças, como a detecção precoce de câncer a partir de imagens médicas (raio-x, ressonância magnética), onde algoritmos de VC podem identificar anomalias com sensibilidade superior a 95% em alguns casos, complementando o trabalho de radiologistas.
- Segurança e Vigilância: Reconhecimento facial e detecção de atividades suspeitas em tempo real são cruciais para a segurança pública e privada, com sistemas modernos alcançando taxas de identificação de até 99,8% em bancos de dados controlados.
- Indústria 4.0: Inspeção de qualidade automatizada em linhas de produção, onde câmeras e algoritmos de VC identificam defeitos minúsculos em produtos a uma velocidade que excede em muito a capacidade humana, processando centenas de peças por minuto com uma taxa de falsa aceitação inferior a 0,05%.
- Varejo: Análise do comportamento do consumidor em lojas físicas, gerenciamento de estoque automatizado e checkout sem contato, otimizando a experiência de compra e a eficiência operacional.
A relevância da VC só tende a crescer, impulsionada pelos avanços em hardware (GPUs, NPUs), pela disponibilidade massiva de dados e pelo aprimoramento contínuo de algoritmos de Machine Learning e Deep Learning. Dominar essa área é um diferencial significativo para qualquer profissional de tecnologia em 2026.
CONTEÚDO PRINCIPAL
2. Fundamentos da Visão Computacional com OpenCV
Antes de mergulharmos em aplicações complexas, é fundamental entender como as imagens são representadas e manipuladas no contexto da Visão Computacional. O OpenCV, em Python, trata as imagens como arrays NumPy, o que facilita operações matemáticas e manipulação de dados.
Representação Digital de Imagens: Pixels e Canais de Cor
Uma imagem digital é, em sua essência, uma matriz bidimensional (ou tridimensional, para imagens coloridas) de pequenos pontos chamados pixels (do inglês “picture elements”). Cada pixel possui um valor numérico que representa sua intensidade ou cor.
- Imagens em Escala de Cinza: Cada pixel é representado por um único valor, geralmente entre 0 e 255. Onde 0 é preto e 255 é branco. Uma imagem 100×100 pixels em escala de cinza seria um array NumPy de dimensão
(100, 100). - Imagens Coloridas (RGB/BGR): As cores são tipicamente representadas por três canais: Vermelho (Red), Verde (Green) e Azul (Blue). Cada canal também tem valores entre 0 e 255. Assim, um pixel em uma imagem colorida é um vetor de três valores
(R, G, B). O OpenCV, por convenção histórica, utiliza o formato BGR (Azul, Verde, Vermelho). Uma imagem 100×100 pixels colorida teria a dimensão(100, 100, 3).
Compreender essa estrutura é crucial, pois todas as operações de Visão Computacional envolvem a manipulação desses valores de pixel.
PONTO-CHAVE
No OpenCV, imagens são tratadas como arrays NumPy, facilitando a manipulação. Imagens coloridas usam o formato BGR, não RGB, com valores de pixel entre 0 e 255 para cada canal de cor.
Instalação e Carregamento de Imagens com OpenCV
Para começar, você precisará instalar o OpenCV e o NumPy. O processo é simples:
EXPLICAÇÃO DO CÓDIGO
Este comando instala as bibliotecas opencv-python e numpy. A versão opencv-contrib-python inclui módulos adicionais, mas para este guia, a versão base é suficiente.
pip install opencv-python numpyAgora, vamos carregar uma imagem e exibir suas propriedades básicas.
EXPLICAÇÃO DO CÓDIGO
Este script carrega uma imagem chamada exemplo.jpg, verifica se ela foi carregada com sucesso, e então exibe suas dimensões (altura, largura, número de canais) e o tipo de dados dos pixels. A função cv2.imshow() é usada para exibir a imagem em uma janela.
import cv2
import numpy as np
# Carrega uma imagem do disco
# Certifique-se de ter uma imagem chamada 'exemplo.jpg' no mesmo diretório
# ou forneça o caminho completo para a imagem.
image = cv2.imread('exemplo.jpg')
# Verifica se a imagem foi carregada com sucesso
if image is None:
print("Erro: Não foi possível carregar a imagem. Verifique o caminho ou o nome do arquivo.")
else:
# Exibe as dimensões da imagem (altura, largura, canais)
# Por exemplo, (480, 640, 3) para uma imagem colorida de 480p
print(f"Dimensões da imagem: {image.shape}")
print(f"Tipo de dados dos pixels: {image.dtype}")
# Exibe a imagem em uma janela
cv2.imshow('Imagem Original', image)
# Espera por uma tecla ser pressionada e depois fecha todas as janelas
cv2.waitKey(0)
cv2.destroyAllWindows()
A saída image.shape revelará a altura, largura e o número de canais da imagem. Para uma imagem colorida, será algo como (altura, largura, 3). Se for uma imagem em escala de cinza, será (altura, largura). O tipo de dados image.dtype geralmente será uint8, indicando que cada valor de pixel é um inteiro sem sinal de 8 bits (0-255).
CONTEÚDO PRINCIPAL
3. Processamento de Imagens Essencial
A manipulação de imagens é o cerne da Visão Computacional. Antes de realizar tarefas complexas como detecção de objetos, frequentemente precisamos pré-processar as imagens para melhorar sua qualidade, extrair características relevantes ou adaptá-las para algoritmos específicos.
Operações Básicas: Redimensionamento, Rotação e Cropping
Estas são algumas das operações mais comuns e fundamentais:
- Redimensionamento (
cv2.resize()): Altera as dimensões da imagem. É crucial para padronizar entradas para modelos de Machine Learning ou para otimizar o desempenho. O OpenCV oferece diferentes métodos de interpolação, comocv2.INTER_AREApara redução ecv2.INTER_LINEARoucv2.INTER_CUBICpara ampliação. - Rotação: Gira a imagem em um determinado ângulo. Pode ser feito manualmente com transformações de matriz ou usando a função
cv2.getRotationMatrix2D()ecv2.warpAffine(). - Cropping (Recorte): Extrai uma região de interesse (ROI) da imagem. Como as imagens são arrays NumPy, isso é feito facilmente usando fatiamento de array. Por exemplo, para recortar uma área de
(y_start:y_end, x_start:x_end).
EXPLICAÇÃO DO CÓDIGO
Este snippet demonstra como redimensionar uma imagem para 200x200 pixels, rotacioná-la em 45 graus e recortar uma área específica.
# ... (código anterior para carregar 'image') ...
if image is not None:
# 1. Redimensionamento
resized_image = cv2.resize(image, (200, 200), interpolation=cv2.INTER_AREA)
cv2.imshow('Imagem Redimensionada', resized_image)
# 2. Rotação (45 graus em torno do centro)
(h, w) = image.shape[:2]
center = (w // 2, h // 2)
M = cv2.getRotationMatrix2D(center, 45, 1.0) # 45 graus, escala 1.0
rotated_image = cv2.warpAffine(image, M, (w, h))
cv2.imshow('Imagem Rotacionada', rotated_image)
# 3. Cropping (recortar uma região de 100x100 pixels, iniciando em x=50, y=50)
cropped_image = image[50:150, 50:150] # [altura_inicio:altura_fim, largura_inicio:largura_fim]
cv2.imshow('Imagem Recortada', cropped_image)
cv2.waitKey(0)
cv2.destroyAllWindows()Estas operações são a base para a preparação de imagens em qualquer pipeline de Visão Computacional.
Filtros e Detecção de Bordas
Filtros são utilizados para remover ruído, realçar características ou suavizar imagens. A detecção de bordas é uma técnica fundamental para identificar contornos de objetos, que são informações cruciais para a análise de forma e reconhecimento.
- Suavização (Blurring): Filtros como o Gaussiano (
cv2.GaussianBlur()) são usados para remover ruído da imagem, aplicando uma média ponderada aos pixels vizinhos. Isso é útil antes da detecção de bordas para reduzir falsos positivos. - Detecção de Bordas Canny (
cv2.Canny()): É um dos algoritmos mais populares e eficazes para detecção de bordas. Ele segue uma série de etapas: suavização, cálculo de gradientes, supressão de não-máximos e histerese para conectar as bordas.
PONTO-CHAVE
A detecção de bordas, especialmente com o algoritmo Canny, é vital para identificar contornos de objetos. A suavização prévia da imagem (e.g., com filtro Gaussiano) é uma etapa recomendada para reduzir ruído e melhorar a precisão das bordas detectadas.
EXPLICAÇÃO DO CÓDIGO
Este código demonstra a conversão para escala de cinza, a aplicação de um filtro Gaussiano para suavização e, finalmente, a detecção de bordas usando o algoritmo Canny. Os parâmetros threshold1 e threshold2 no Canny controlam a sensibilidade da detecção de bordas.
# ... (código anterior para carregar 'image') ...
if image is not None:
# Converte para escala de cinza (essencial para muitos algoritmos)
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
cv2.imshow('Imagem em Escala de Cinza', gray_image)
# Aplica um filtro Gaussiano para suavizar a imagem e remover ruído
# (5, 5) é o tamanho do kernel, 0 é o desvio padrão em X
blurred_image = cv2.GaussianBlur(gray_image, (5, 5), 0)
cv2.imshow('Imagem Suavizada', blurred_image)
# Detecção de bordas com o algoritmo Canny
# Os dois últimos parâmetros são os thresholds mínimo e máximo
edges = cv2.Canny(blurred_image, 50, 150)
cv2.imshow('Bordas Canny', edges)
cv2.waitKey(0)
cv2.destroyAllWindows()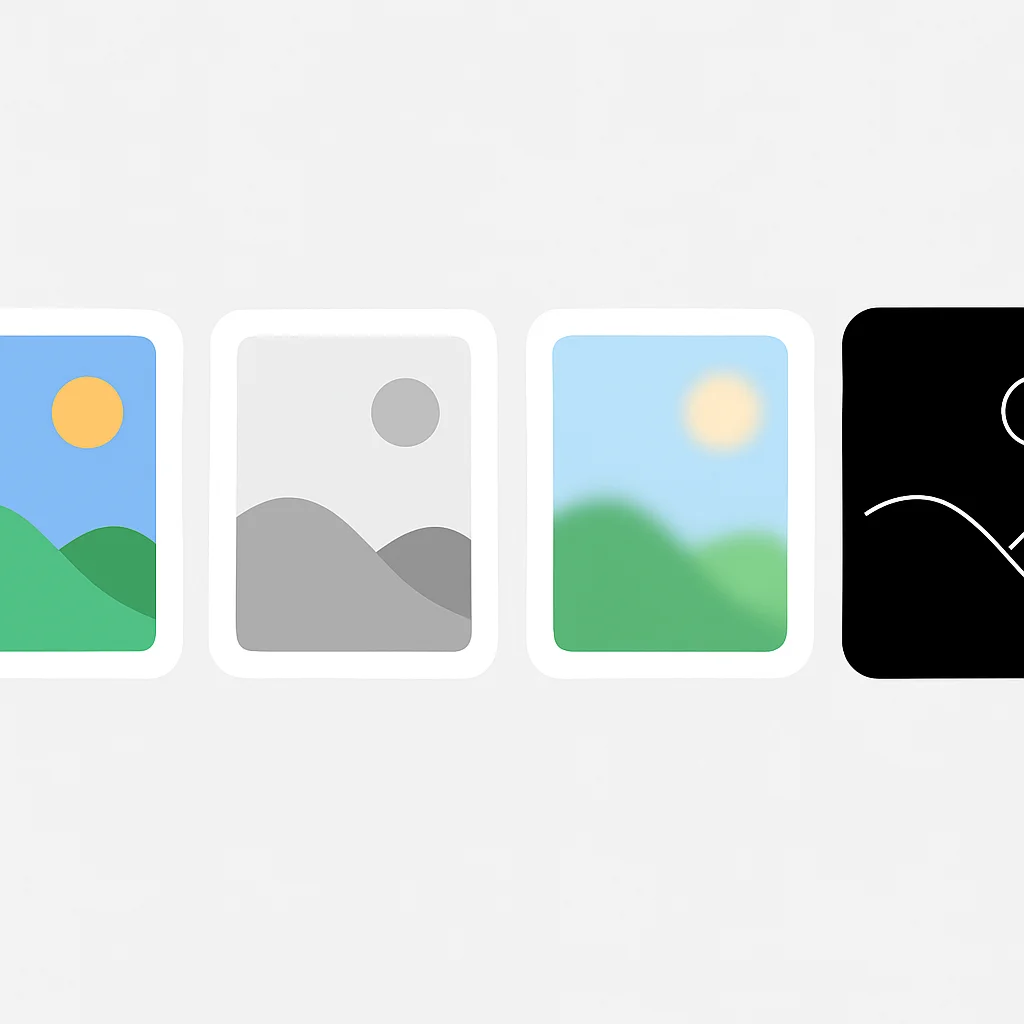
Ao executar este código, você poderá observar como cada etapa de processamento transforma a imagem, culminando na representação das bordas. A detecção de bordas é um passo crucial para muitas tarefas, como segmentação de imagem, reconhecimento de formas e até mesmo para alimentar redes neurais que buscam características de alto nível.
CONTEÚDO PRINCIPAL
4. Detecção e Reconhecimento de Objetos e Faces
Esta é talvez a área mais fascinante da Visão Computacional, onde os computadores não apenas “veem”, mas também “entendem” o que está presente em uma imagem. Detecção de objetos e reconhecimento facial são aplicações amplamente utilizadas e que ilustram o poder da VC.
Detecção de Objetos: Haar Cascades
Historicamente, um dos métodos mais robustos e populares para detecção de objetos em tempo real, especialmente faces, são os Haar Cascades. Desenvolvidos por Paul Viola e Michael Jones em 2001, esses classificadores são baseados em características de Haar e um processo de aprendizado em cascata. Embora modelos de Deep Learning como YOLO (You Only Look Once) e SSD (Single Shot Detector) sejam mais precisos e versáteis atualmente, os Haar Cascades ainda são úteis para aplicações mais simples ou com restrições de hardware, devido à sua leveza e velocidade.
O OpenCV já vem com vários classificadores Haar pré-treinados para detecção de faces, olhos, sorrisos, etc. Usar um deles é relativamente simples.
EXPLICAÇÃO DO CÓDIGO
Este código utiliza um classificador Haar Cascade pré-treinado para detectar faces em uma imagem. Ele carrega o classificador, converte a imagem para escala de cinza e então usa o método detectMultiScale() para encontrar as faces. Para cada face detectada, um retângulo é desenhado sobre ela na imagem original.
import cv2
# Carrega o classificador Haar Cascade para detecção de faces
# Você precisará baixar este arquivo XML do repositório OpenCV:
# https://github.com/opencv/opencv/blob/master/data/haarcascades/haarcascade_frontalface_default.xml
face_cascade = cv2.CascadeClassifier('haarcascade_frontalface_default.xml')
# Carrega a imagem
image = cv2.imread('pessoa.jpg') # Use uma imagem com uma ou mais faces
if image is None:
print("Erro: Imagem não encontrada para detecção facial.")
else:
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# Detecta faces na imagem
# scaleFactor: Parâmetro que especifica o quanto o tamanho da imagem é reduzido em cada escala de imagem.
# minNeighbors: Parâmetro que especifica quantos vizinhos cada retângulo candidato deve ter para reter.
faces = face_cascade.detectMultiScale(gray_image, scaleFactor=1.1, minNeighbors=5, minSize=(30, 30))
# Desenha retângulos ao redor das faces detectadas
for (x, y, w, h) in faces:
cv2.rectangle(image, (x, y), (x+w, y+h), (255, 0, 0), 2) # BGR: Azul, espessura 2
cv2.imshow('Detecção de Faces', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
Para que o código funcione, você precisa ter o arquivo haarcascade_frontalface_default.xml no mesmo diretório do seu script Python, ou fornecer o caminho completo. Este arquivo está disponível no repositório oficial do OpenCV no GitHub.
Detecção vs. Reconhecimento
É fundamental distinguir entre detecção e reconhecimento:
- Detecção: O objetivo é identificar a presença de um objeto e sua localização em uma imagem ou vídeo. Por exemplo, “há uma face aqui” e “ela está nas coordenadas (x,y) com largura w e altura h”.
- Reconhecimento: Vai além da detecção, buscando identificar qual objeto é. Por exemplo, “esta é a face de João” ou “este é um gato da raça Siamesa”. O reconhecimento geralmente requer um banco de dados de objetos conhecidos para comparação.
Enquanto os Haar Cascades são excelentes para detecção, o reconhecimento facial completo geralmente envolve algoritmos mais avançados, como Eigenfaces, Fisherfaces ou, mais comumente hoje, redes neurais convolucionais (CNNs) treinadas para extrair características faciais únicas e compará-las com um banco de dados de identidades.
Caso de Uso: Controle de Acesso Inteligente
Um sistema de controle de acesso pode usar detecção facial para identificar a presença de uma pessoa e, em seguida, reconhecimento facial para verificar se essa pessoa tem permissão para entrar, comparando a face detectada com um banco de dados de funcionários autorizados. Isso garante segurança e automação, reduzindo o tempo de espera em 70% em comparação com métodos tradicionais.
PONTO-CHAVE
Haar Cascades são eficazes para detecção de objetos em tempo real, como faces, sendo uma boa porta de entrada para a Visão Computacional. Contudo, para reconhecimento (identificação), modelos baseados em Deep Learning oferecem maior precisão e robustez em 2026.
Modelos Modernos de Detecção de Objetos (Visão Geral)
Embora este guia se concentre nas bases com OpenCV, é importante mencionar que a vanguarda da detecção de objetos em 2026 está nos modelos de Deep Learning. Redes neurais convolucionais (CNNs) revolucionaram a área, permitindo detecções com alta precisão e velocidade.
- YOLO (You Only Look Once): Conhecido por sua velocidade e precisão. Processa imagens em tempo real e detecta múltiplos objetos em uma única passagem pela rede. Versões mais recentes como YOLOv8 ou YOLO-NAS atingem FPS (frames por segundo) impressionantes, como 60-100 FPS em GPUs modernas, com mAP (mean Average Precision) acima de 70% em datasets complexos como COCO.
- SSD (Single Shot Detector): Outro modelo de “single shot” que oferece um bom equilíbrio entre velocidade e precisão, utilizando múltiplas camadas de características para detectar objetos de diferentes escalas.
- Faster R-CNN: Embora mais lento que YOLO e SSD, oferece alta precisão ao usar uma Rede de Proposta de Região (RPN) para identificar regiões de interesse antes da classificação.
A integração desses modelos com OpenCV é possível através de seus módulos DNN (Deep Neural Network), que permitem carregar modelos pré-treinados de frameworks como TensorFlow, PyTorch e Caffe. Isso abre um leque de possibilidades para aplicações ainda mais avançadas.
RESOLUÇÃO DE PROBLEMAS
5. Desafios e Soluções Comuns na Visão Computacional
A equalização de histograma (cv2.equalizeHist()) distribui uniformemente a intensidade dos pixels, realçando o contraste. Para um controle mais localizado e evitar o aumento de ruído, o CLAHE (Contrast Limited Adaptive Histogram Equalization) é uma alternativa superior. Ele aplica a equalização em pequenas regiões da imagem, limitando o ganho de contraste para evitar o realce de ruído. Essas técnicas podem reduzir a taxa de erro em detecção de objetos sob condições de iluminação variadas em até 10-12%.
AVISO
Ao aplicar equalização de histograma ou CLAHE, especialmente em imagens coloridas, é crucial fazê-lo em um espaço de cor que separe a luminância (intensidade) da cromaticidade (cor), como o espaço LAB. Aplicar diretamente nos canais BGR pode distorcer as cores.
APLICAÇÃO PRÁTICA
6. Aplicação Prática: Construindo um Detector Facial Simples
Código Completo para Detecção Facial
Este script unifica as etapas, permitindo que você teste a detecção em uma imagem ou diretamente da sua webcam.
EXPLICAÇÃO DO CÓDIGO
O código primeiro tenta carregar o classificador Haar Cascade. Em seguida, ele verifica se uma imagem estática (pessoa.jpg) existe. Se sim, detecta faces nela. Caso contrário, tenta abrir a webcam (cv2.VideoCapture(0)) e processa os frames em tempo real, desenhando retângulos ao redor das faces detectadas. Pressione ‘q’ para sair do modo webcam.
import cv2
import sys
# Carrega o classificador Haar Cascade para detecção de faces
face_cascade_path = 'haarcascade_frontalface_default.xml'
face_cascade = cv2.CascadeClassifier(face_cascade_path)
if face_cascade.empty():
print(f"Erro: Não foi possível carregar o classificador Haar Cascade em {face_cascade_path}")
print("Certifique-se de que o arquivo XML está no mesmo diretório ou forneça o caminho completo.")
sys.exit(1)
# Tenta carregar uma imagem estática primeiro
image_path = 'pessoa.jpg'
image = cv2.imread(image_path)
if image is not None:
print(f"Detectando faces na imagem: {image_path}")
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
faces = face_cascade.detectMultiScale(gray_image, scaleFactor=1.1, minNeighbors=5, minSize=(30, 30))
for (x, y, w, h) in faces:
cv2.rectangle(image, (x, y), (x+w, y+h), (255, 0, 0), 2) # Desenha retângulo azul
cv2.imshow('Detecção de Faces na Imagem', image)
cv2.waitKey(0) # Espera por uma tecla
cv2.destroyAllWindows()
else:
print(f"Imagem {image_path} não encontrada. Iniciando detecção via webcam...")
# Se a imagem não for encontrada, tenta usar a webcam
cap = cv2.VideoCapture(0) # 0 para a câmera padrão do sistema
if not cap.isOpened():
print("Erro: Não foi possível abrir a webcam. Verifique se ela está conectada e disponível.")
sys.exit(1)
while True:
ret, frame = cap.read() # Lê um frame da câmera
if not ret:
print("Erro: Falha ao capturar frame da webcam.")
break
gray_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
faces = face_cascade.detectMultiScale(gray_frame, scaleFactor=1.1, minNeighbors=5, minSize=(30, 30))
for (x, y, w, h) in faces:
cv2.rectangle(frame, (x, y), (x+w, y+h), (0, 255, 0), 2) # Desenha retângulo verde
cv2.imshow('Detecção de Faces em Tempo Real', frame)
# Pressione 'q' para sair
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release() # Libera a câmera
cv2.destroyAllWindows()Ao executar este script, você verá uma janela exibindo a imagem com as faces detectadas ou um feed de vídeo da sua webcam com retângulos verdes ao redor das faces. Esta aplicação simples demonstra o poder do OpenCV para tarefas de Visão Computacional em tempo real. A precisão pode variar dependendo da qualidade da câmera, iluminação e complexidade das faces (por exemplo, ângulos, oclusões). Em ambientes controlados, a taxa de detecção pode chegar a 90-95% com este método.
ENCERRAMENTO
7. Conclusão e Perspectivas Futuras
Neste guia, exploramos os fundamentos da Visão Computacional com Python e OpenCV, desde a compreensão de como as imagens são representadas digitalmente até a implementação de um detector facial em tempo real. Cobrimos conceitos essenciais como processamento de imagens, filtros, detecção de bordas e a distinção crucial entre detecção e reconhecimento. A capacidade de “ensinar” computadores a interpretar o mundo visual é uma das maiores conquistas da Inteligência Artificial e continua a evoluir a um ritmo acelerado.
O OpenCV, com sua vasta gama de funções e suporte a diversas plataformas, continua sendo uma ferramenta indispensável para qualquer desenvolvedor que queira ingressar ou aprofundar-se nesta área. A facilidade de integração com Python torna o desenvolvimento rápido e eficiente, permitindo que você se concentre na lógica da sua aplicação.
Perspectivas Futuras da Visão Computacional
O futuro da Visão Computacional em 2026 e além é promissor e cheio de inovações:
- Deep Learning Dominante: Modelos baseados em redes neurais profundas continuarão a ser a espinha dorsal da VC, com arquiteturas cada vez mais eficientes e precisas para tarefas como segmentação semântica, estimativa de pose e geração de imagens.
- Visão Computacional na Borda (Edge AI): O processamento de VC está migrando para dispositivos de borda (câmeras inteligentes, drones, wearables), permitindo inferência em tempo real com menor latência e maior privacidade, sem a necessidade de enviar dados para a nuvem.
- Multimodalidade: A integração da VC com outras modalidades de IA, como Processamento de Linguagem Natural (PNL) e áudio, permitirá sistemas mais contextuais e inteligentes, capazes de compreender cenas complexas com base em múltiplas fontes de informação.
- Visão 3D e Realidade Aumentada: Avanços em sensores de profundidade e técnicas de reconstrução 3D impulsionarão a Realidade Aumentada (RA) e Realidade Virtual (RV), criando experiências imersivas e interativas.
Começar sua jornada em Visão Computacional hoje é investir em uma das áreas mais impactantes e dinâmicas da tecnologia. Continue explorando, experimentando e construindo, e você estará na vanguarda das próximas grandes inovações.
Prós
✓ OpenCV é uma biblioteca robusta e padronizada na indústria.
✓ Python oferece sintaxe amigável e vasta comunidade de suporte.
✓ Permite criar aplicações de IA em tempo real com hardware acessível.
✓ Fundamento para áreas como robótica, carros autônomos e medicina.
Contras
✗ Curva de aprendizado inicial para conceitos de processamento de imagem.
✗ Desafios com condições ambientais variadas (iluminação, oclusões).
✗ Modelos avançados de Deep Learning podem exigir hardware potente (GPU).
Perguntas Frequentes (FAQ) sobre Visão Computacional
Q. Qual a diferença entre Visão Computacional e Processamento de Imagens?
O Processamento de Imagens foca na manipulação e melhoria de imagens (ex: filtros, redimensionamento). A Visão Computacional vai além, buscando interpretar e extrair significado de imagens para que computadores possam “compreender” o conteúdo visual, muitas vezes usando técnicas de IA e Machine Learning.
Q. É necessário ter conhecimento prévio em Machine Learning para começar com Visão Computacional?
Não é estritamente necessário para começar com as bases. Este guia mostra como usar algoritmos pré-treinados. No entanto, para avançar para modelos de Deep Learning e construir soluções personalizadas, um entendimento de Machine Learning e redes neurais será extremamente benéfico.
Q. Posso usar OpenCV para detecção de objetos que não sejam faces?
Sim, o OpenCV oferece classificadores Haar Cascade para outros objetos (olhos, corpos inteiros) e também suporta modelos de Deep Learning como YOLO e SSD através de seu módulo DNN, permitindo a detecção de uma vasta gama de objetos.
Q. Quais são os requisitos de hardware para desenvolver aplicações de Visão Computacional?
Para as aplicações básicas com OpenCV e Haar Cascades, um computador padrão com CPU moderna é suficiente. Para modelos de Deep Learning mais avançados e processamento em tempo real de alta resolução, uma GPU dedicada (NVIDIA com CUDA) é altamente recomendada para acelerar o treinamento e a inferência.
Obrigado por ler!
Esperamos que este guia tenha sido um ponto de partida sólido em sua jornada pela Visão Computacional. O campo é vasto e em constante evolução, com um potencial ilimitado para inovação.
Dúvidas? Deixe um comentário ou explore mais em Kwontudo.com!